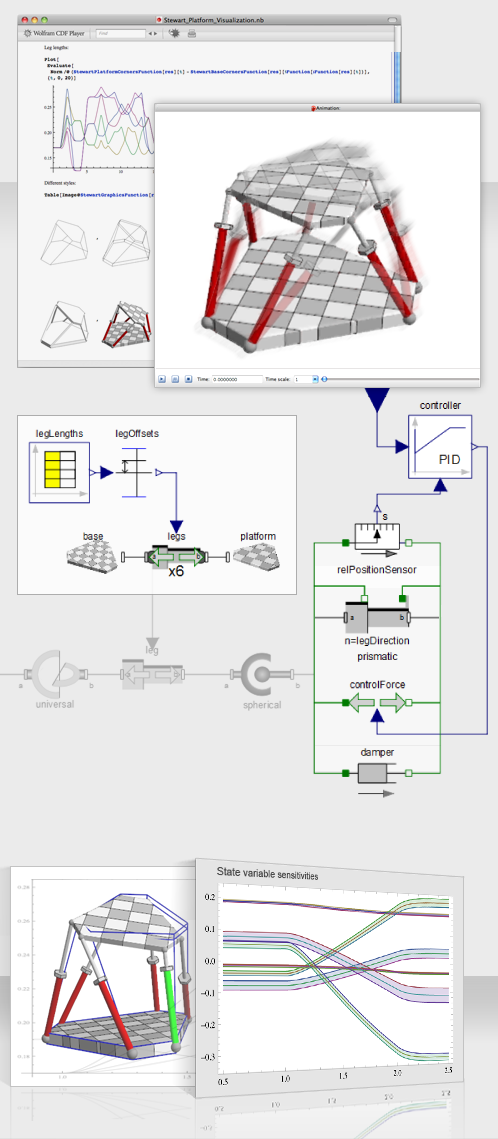
Actuador lineal en el cual una fuerza de control dirige la longitud de la pata hacia la señal de referencia.
Para ejecutar este ejemplo necesitará
Por favor haga una selección:
Obtener unaVisualización personalizada mediante Mathematica
Cree visualizaciones y animaciones refinadas utilizando el lenguaje gráfico 2D y 3D completo de Mathematica.
Análisis de sensibilidad
Estudie la sensibilidad de las seis variables de estado ante un error sistemático en la longitud de una de las patas.
Video Export
Desarrolle animaciones personalizadas de alta calidad en Mathematica y expórtelas a formatos de video estándar.
Componentes personalizados reutilizables
Cree un componente que represente un actuador lineal idealizado que pueda reutilizarse en otros modelos mecánicos.
Probar
Comprar
System Modeler está disponible en inglés
y japonés
para Windows, macOS y Linux »
¿Preguntas? ¿Comentarios? Contacte a un experto de Wolfram »