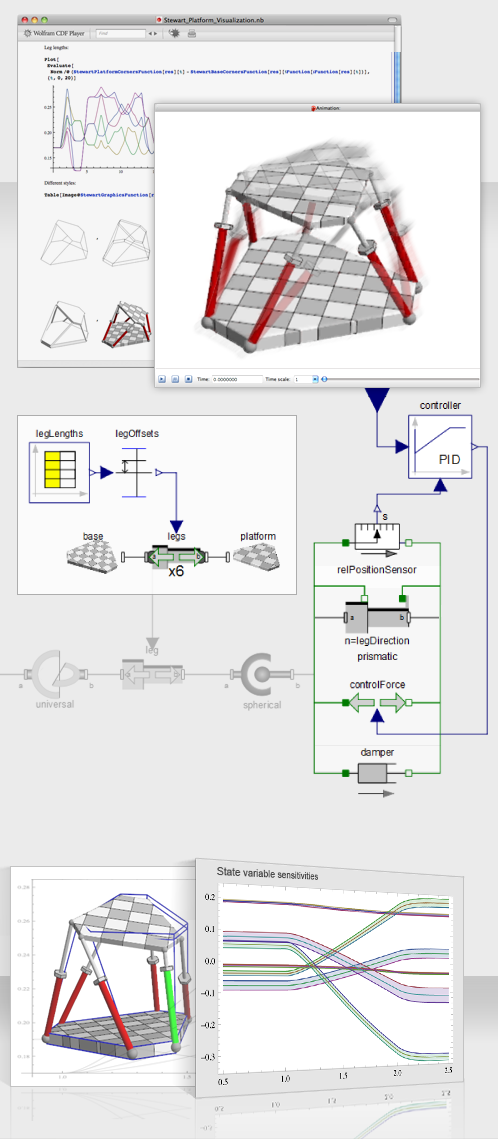
Linear actuator in which a control force drives the leg length toward the reference signal
実装前に新しい製造過程をモデル化したり,既存の製造過程をモデル化したりして問題を診断します.Mathematicaを使うと,モデルの前処理・後処理,シミュレーション,結果等の解析が可能です.
Custom Visualization with Mathematica
Create polished visualizations and animations with Mathematica's full 2D and 3D graphics language.
Sensitivity Analysis
Study the sensitivity of the six state variables to a systematic error in the length of one leg.
Video Export
Develop high-quality custom animations in Mathematica and export to standard video formats.
Reusable Custom Components
Create a component representing an idealized linear actuator that can be reused in other mechanical models.
評価版
ご購入
System ModelerはWindows,macOS,
Linuxで
日本語と英語でご利用になれます »
ご質問やコメントはWolframエキスパートまでお寄せください »