관성 모멘트
회전 관성을 포함한 강체의 물리적 매개 변수를 취급하는 새로운 기능을 알아봅니다.
In[1]:=
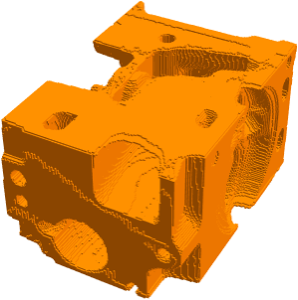
wrench = ExampleData[{"Geometry3D", "Wrench"}, "Region"]Out[1]=

렌치의 회전점을 선택합니다.
In[2]:=
point = {-8, -0.168, 0};In[3]:=
Show[wrench, Graphics3D[{PointSize[Large], Point[point]}],
ViewPoint -> {0, -\[Infinity], 0}]Out[3]=

이 점을 중심으로하는 관성 행렬을 알아봅니다.
In[4]:=
\[ScriptCapitalI] = MomentOfInertia[wrench, point]Out[4]=
몸을 회전하기 위한 축의 주축을 구합니다.
In[5]:=
principalaxes = Eigenvectors[\[ScriptCapitalI]]Out[5]=
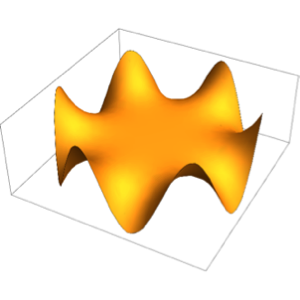
반경이 주축 주위에서 속도를 높일때 상대 저항을 나타내는 관성 타원체를 구합니다.
In[6]:=
inertiaellipsoid = Ellipsoid[point, 1000 Inverse[\[ScriptCapitalI]]]Out[6]=
렌치를 그 주축 및 관성 타원체와 함께 표시합니다. 렌치의 손잡이는 그 주축을 따라 타원체를 늘립니다.
전체 Wolfram 언어 입력 표시하기

In[8]:=
Show[wrench, axes, BaseStyle -> Opacity[0.3]]Out[8]=