General Nonlinear Systems
Just like affine systems, the general nonlinear systems can also be specified in multiple ways and be converted to other systems models.
A system specified using an ODE.
| In[1]:= | X |
| Out[1]= | 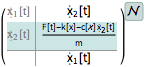 |
A system specified using its components.
| In[2]:= | X |
| Out[2]= | 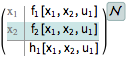 |
Systems obtained from other systems models.
| In[3]:= |  X |
| Out[3]= |  |
| In[4]:= |  X |
| Out[4]= | 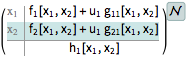 |
A linear NonlinearStateSpaceModel is exactly converted to linear systems models.
| In[5]:= | 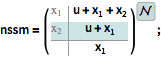 X |
| In[6]:= | X |
| Out[6]= |  |
An input-linear system is exactly converted to an AffineStateSpaceModel.
| In[7]:= | 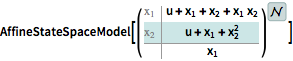 X |
| Out[7]= | 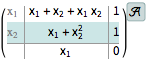 |
In general, conversions to other systems models are approximate.
| In[8]:= | 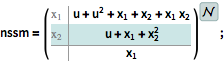 X |
| In[9]:= | X |
| Out[9]= |  |




















