Evaluate a Linear Controller Design Using Nonlinear Simulation
Starting with a nonlinear model, design a linear controller and evaluate the performance of the controller on the nonlinear system.
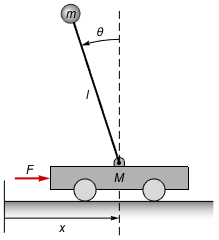 |
The model of an inverted pendulum is nonlinear, but linear in the input force  .
.
| In[1]:= | X |
| In[2]:= | X |
| In[3]:= | X |
| Out[3]= | 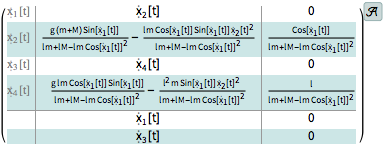 |
Design a controller based on the linear model.
| In[4]:= | X |
| Out[4]= |
Connect the linear controller to the nonlinear model.
| In[5]:= | X |
| Out[5]= | 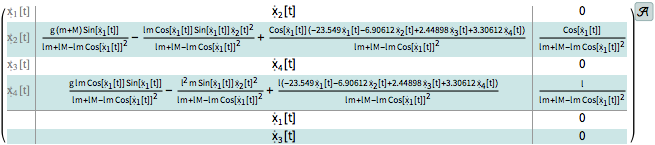 |
Simulate the nonlinear closed-loop system.
| In[6]:= | X |
| In[7]:= | X |
| Out[7]= | 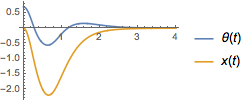 |




















