Инерция
Откройте для себя новые возможности, охватывающие физические параметры твердых тел, в том числе инерцию вращения.
In[1]:=
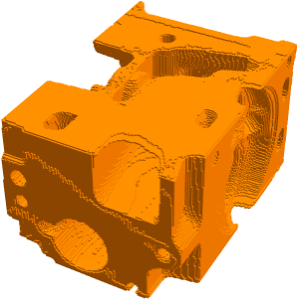
wrench = ExampleData[{"Geometry3D", "Wrench"}, "Region"]Out[1]=

Выберем точку, вокруг которой будет вращаться гаечный ключ.
In[2]:=
point = {-8, -0.168, 0};In[3]:=
Show[wrench, Graphics3D[{PointSize[Large], Point[point]}],
ViewPoint -> {0, -\[Infinity], 0}]Out[3]=

Центр матрицы инерции будет находится в данной точке.
In[4]:=
\[ScriptCapitalI] = MomentOfInertia[wrench, point]Out[4]=
Определим главные оси, вокруг которых будет вращаться геометрических объект.
In[5]:=
principalaxes = Eigenvectors[\[ScriptCapitalI]]Out[5]=
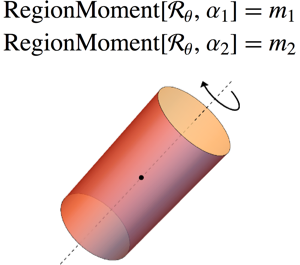
Определим эллипсоид инерции, радиусы которого указывают на относительную устойчивость к ускорению относительно главной оси.
In[6]:=
inertiaellipsoid = Ellipsoid[point, 1000 Inverse[\[ScriptCapitalI]]]Out[6]=
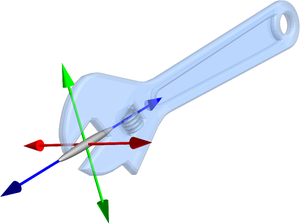
Проиллюстрируем ключ с его главными осями и эллипсоидом инерции. Ручка ключа содержит эллипсоид, расположенный вдоль её оси.
код на языке Wolfram Language целиком
In[8]:=
Show[wrench, axes, BaseStyle -> Opacity[0.3]]Out[8]=