처진 사슬 모델링
두 점 사이에 매달린 길이가  인 체인 또는 케이블의 최소 포텐셜 에너지와 위치를 구합니다.
인 체인 또는 케이블의 최소 포텐셜 에너지와 위치를 구합니다.

체인의 길이  , 왼쪽 끝의 높이
, 왼쪽 끝의 높이  , 오른쪽 끝의 높이
, 오른쪽 끝의 높이  에 대한 매개 변수값을 설정합니다.
에 대한 매개 변수값을 설정합니다.
In[1]:=
L = 4; a = 1; b = 3;  를
를  인 수평 위치의 함수로 체인의 길이를 정합니다.
인 수평 위치의 함수로 체인의 길이를 정합니다.
In[2]:=
xf = 1; nh = 201; h := xf/nh;체인  의 높이에 대한 변수를 설정합니다.
의 높이에 대한 변수를 설정합니다.
In[3]:=
varsy = Array[y, nh + 1, {0, nh}];위치  에서의 기울기를
에서의 기울기를  로 나타나고 그에 대한 변수를 설정합니다.
로 나타나고 그에 대한 변수를 설정합니다.
In[4]:=
varsm = Array[m, nh + 1, {0, nh}]; 에서
에서  까지의 부분적인 포텐셜 에너지를
까지의 부분적인 포텐셜 에너지를  로 표시합니다.
로 표시합니다.
In[5]:=
varsv = Array[v, nh + 1, {0, nh}];위치  에서의 체인의 길이를
에서의 체인의 길이를  로 나타나고 그에 대한 변수를 설정합니다.
로 나타나고 그에 대한 변수를 설정합니다.
In[6]:=
varss = Array[s, nh + 1, {0, nh}];모든 변수를 연결합니다.
In[7]:=
vars = Join[varsm, varsy, varsv, varss];여기서 목적은 전체 포텐셜 에너지 을 최소화하는 것입니다.
을 최소화하는 것입니다.
In[8]:=
objfn = v[nh];다음은 기하학으로부터의 경계값 제약 조건입니다.
In[9]:=
bndcons = {y[0] == a, y[nh] == b, v[0] == 0, s[0] == 0, s[nh] == L};상미분 방정식  ,
,  ,
,  을 이산화합니다.
을 이산화합니다.
In[10]:=
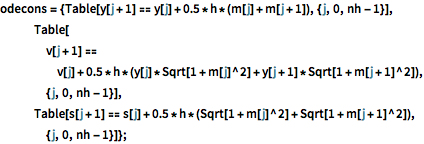
odecons = {Table[
y[j + 1] == y[j] + 0.5*h*(m[j] + m[j + 1]), {j, 0, nh - 1}],
Table[v[j + 1] ==
v[j] + 0.5*
h*(y[j]*Sqrt[1 + m[j]^2] + y[j + 1]*Sqrt[1 + m[j + 1]^2]), {j,
0, nh - 1}],
Table[s[j + 1] ==
s[j] + 0.5*h*(Sqrt[1 + m[j]^2] + Sqrt[1 + m[j + 1]^2]), {j, 0,
nh - 1}]};변수에 대한 초기점을 선택합니다.
In[11]:=
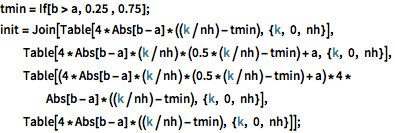
tmin = If[b > a, 0.25 , 0.75]; init =
Join[Table[4*Abs[b - a]*((k/nh) - tmin), {k, 0, nh}],
Table[4*Abs[b - a]*(k/nh)*(0.5*(k/nh) - tmin) + a, {k, 0, nh}],
Table[(4*Abs[b - a]*(k/nh)*(0.5*(k/nh) - tmin) + a)*4*
Abs[b - a]*((k/nh) - tmin), {k, 0, nh}],
Table[4*Abs[b - a]*((k/nh) - tmin), {k, 0, nh}]];제약 조건의 대상이 되는 전체 포텐셜 에너지를 최소화합니다.
In[12]:=
sol = FindMinimum[{objfn, Join[bndcons, odecons]},
Thread[{vars, init}]];솔루션의 점을 추출합니다.
In[13]:=
solpts = Table[{i h, y[i] /. sol[[2]]}, {i, 0, nh}];최소 포텐셜 에너지를 가진 체인의 위치를 플롯합니다.
In[14]:=
ListPlot[solpts, ImageSize -> Medium, PlotTheme -> "Marketing"]Out[14]=

FindFit을 사용하여 현수 곡선에 결과를 맞춥니다.
In[15]:=
catenary[t_] = c1 + (1/c2) Cosh[c2 (t - c3)];In[16]:=
fitsol = FindFit[solpts, catenary[t], {c1, c2, c3}, {t}]Out[16]=
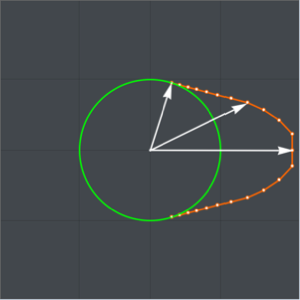
솔루션의 점과 현수 곡선을 함께 플롯합니다.
In[17]:=

Show[Plot[catenary[t] /. fitsol, {t, 0, 1},
PlotStyle -> Directive[Green, Thickness[0.01]],
ImageSize -> Medium],
ListPlot[Take[solpts, 1 ;; nh ;; 5], PlotStyle -> PointSize[.02]]]
Out[17]=