建立一个吊链模型
找出悬挂在两点间长度为 L 的链条或缆绳在势能最小时的位置.

设置链条长度  、 左端高度
、 左端高度  和右端高度
和右端高度  的值.
的值.
In[1]:=
L = 4; a = 1; b = 3; 令  为链条高度,它是水平位置的函数,其中
为链条高度,它是水平位置的函数,其中  .
.
In[2]:=
xf = 1; nh = 201; h := xf/nh;为链条高度  设置变量.
设置变量.
In[3]:=
varsy = Array[y, nh + 1, {0, nh}];用  表示在位置
表示在位置  处的斜率,并为之设置变量.
处的斜率,并为之设置变量.
In[4]:=
varsm = Array[m, nh + 1, {0, nh}];用  表示从
表示从  到
到  的势能部分.
的势能部分.
In[5]:=
varsv = Array[v, nh + 1, {0, nh}];用  表示链条在位置
表示链条在位置  的长度,并为之设置变量.
的长度,并为之设置变量.
In[6]:=
varss = Array[s, nh + 1, {0, nh}];将所有变量结合在一起.
In[7]:=
vars = Join[varsm, varsy, varsv, varss];我们的目的是将势能  最小化.
最小化.
In[8]:=
objfn = v[nh];下面是由几何形状决定的边界值约束.
In[9]:=
bndcons = {y[0] == a, y[nh] == b, v[0] == 0, s[0] == 0, s[nh] == L};将常微分方程  ,
,  ,
,  离散化.
离散化.
In[10]:=
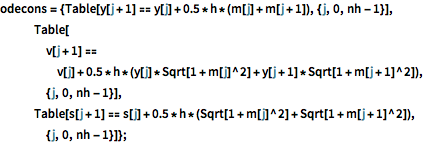
odecons = {Table[
y[j + 1] == y[j] + 0.5*h*(m[j] + m[j + 1]), {j, 0, nh - 1}],
Table[v[j + 1] ==
v[j] + 0.5*
h*(y[j]*Sqrt[1 + m[j]^2] + y[j + 1]*Sqrt[1 + m[j + 1]^2]), {j,
0, nh - 1}],
Table[s[j + 1] ==
s[j] + 0.5*h*(Sqrt[1 + m[j]^2] + Sqrt[1 + m[j + 1]^2]), {j, 0,
nh - 1}]};选取变量的初始点.
In[11]:=
tmin = If[b > a, 0.25 , 0.75]; init =
Join[Table[4*Abs[b - a]*((k/nh) - tmin), {k, 0, nh}],
Table[4*Abs[b - a]*(k/nh)*(0.5*(k/nh) - tmin) + a, {k, 0, nh}],
Table[(4*Abs[b - a]*(k/nh)*(0.5*(k/nh) - tmin) + a)*4*
Abs[b - a]*((k/nh) - tmin), {k, 0, nh}],
Table[4*Abs[b - a]*((k/nh) - tmin), {k, 0, nh}]];在满足约束的条件下将势能最小化.
In[12]:=
sol = FindMinimum[{objfn, Join[bndcons, odecons]},
Thread[{vars, init}]];提取解.
In[13]:=
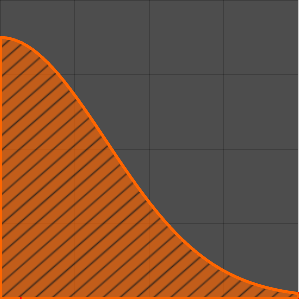
solpts = Table[{i h, y[i] /. sol[[2]]}, {i, 0, nh}];绘制势能最小时链条位置的图形.
In[14]:=
ListPlot[solpts, ImageSize -> Medium, PlotTheme -> "Marketing"]Out[14]=

用 FindFit 将结果与悬链曲线拟合.
In[15]:=
catenary[t_] = c1 + (1/c2) Cosh[c2 (t - c3)];In[16]:=
fitsol = FindFit[solpts, catenary[t], {c1, c2, c3}, {t}]Out[16]=
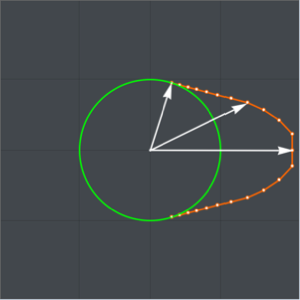
同时绘制解及悬链曲线.
In[17]:=

Show[Plot[catenary[t] /. fitsol, {t, 0, 1},
PlotStyle -> Directive[Green, Thickness[0.01]],
ImageSize -> Medium],
ListPlot[Take[solpts, 1 ;; nh ;; 5], PlotStyle -> PointSize[.02]]]
Out[17]=