Drive an iRobot Create
Open a connection to an iRobot Create serial device.
| In[1]:= | X |
| Out[1]= |  |
Define a set of iRobot commands.
| In[2]:= | 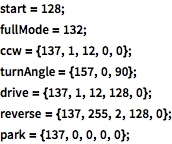 X |
Send a "start" command followed by a "full mode on" command. This readies the robot for responding to drive commands.
| In[3]:= | X |
| In[4]:= | X |
Send the robot a sequence of commands to turn counterclockwise through 90°, drive for five seconds, reverse itself, drive for five seconds, and finally stop.
| In[5]:= | 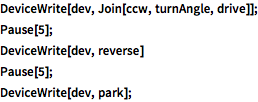 X |