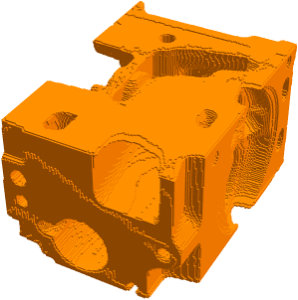
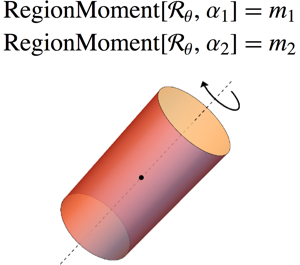
Moment of Inertia
Explore new capabilities covering physical parameters of a rigid body, including rotational inertia.
In[1]:=
wrench = ExampleData[{"Geometry3D", "Wrench"}, "Region"]Out[1]=

Pick a point for the wrench to rotate about.
In[2]:=
point = {-8, -0.168, 0};In[3]:=
Show[wrench, Graphics3D[{PointSize[Large], Point[point]}],
ViewPoint -> {0, -\[Infinity], 0}]Out[3]=

The inertia matrix centered at this point.
In[4]:=
\[ScriptCapitalI] = MomentOfInertia[wrench, point]Out[4]=
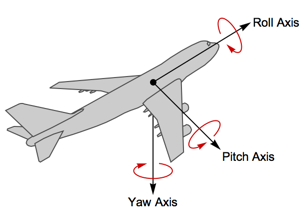
Find the principal axes, the axes a body tends to rotate about.
In[5]:=
principalaxes = Eigenvectors[\[ScriptCapitalI]]Out[5]=
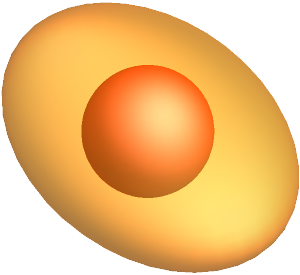
Find the inertia ellipsoid whose radii indicate the relative resistance to accelerate about a principal axis.
In[6]:=
inertiaellipsoid = Ellipsoid[point, 1000 Inverse[\[ScriptCapitalI]]]Out[6]=
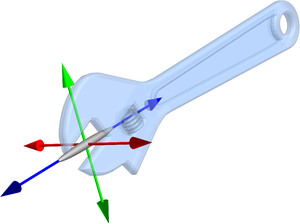
Show the wrench with its principal axes and inertia ellipsoid. The wrench arm stretches the ellipsoid along its axis.
show complete Wolfram Language input
In[8]:=
Show[wrench, axes, BaseStyle -> Opacity[0.3]]Out[8]=